# 数据结构与算法
# 内存中的栈和堆
栈由操作系统自动分配释放,存放函数的参数值,局部变量的值等。其操作方式类似于数据结构中的栈。
堆由程序员分配释放,若程序员不释放,程序结束时可能由OS回收,分配方式类似于链表。
栈使用的是一级缓存,在被调用时处于存储空间中,调用完毕立即释放。
堆则是存放在二级缓存中,生命周期由虚拟机的垃圾回收算法来决定(并不是一旦成为孤儿对象就能被回收)。所以调用这些对象的速度要相对来得低一些。
与堆相比,栈存取速度比堆要快,仅次于直接位于CPU中的寄存器。缺点是存在栈中的数据大小与生存期必须是确定的,缺乏灵活性。
# 二分查找
输入一个有序元素列表,从1/2处开始查找,通过比较大小排除一半元素,再从剩下的元素的1/2处开始查找,不断递归,直到查找到结果为止。
复杂度为O(log n)
# 数组和链表
链表的每一个元素都存储了下一个元素的地址,从而使一系列随机的内存地址串联起来。
在链表中添加元素只需将其放入内存,并将其地址存储到前一个元素中。
从链表中读取元素时,需要从第一个元素开始,依次往下访问,直到找到对应元素为止,所以读取元素效率较低。
数组中的元素在内存中紧连在一起,所以从数组中随机的读取元素,只需要根据其索引值和起始地址做简单的算术运算即可。但是在数组中插入元素,就需要将要插入位置之后的元素依次后移,然后再讲元素插入,所以其插入效率较低。
数组和链表的操作运行时间对比如下:
| 操作 | 数组 | 链表 |
|---|---|---|
| 读取 | O(1) | O(n) |
| 插入 | O(n) | O(1) |
| 删除 | O(n) | O(1) |
# 选择排序
依次找到最小值,并将最小值与对应位置的元素交换
复杂度为O(n2)
function selectionSort(arr) {
let length = arr.length,
minIndex, temp;
for (var i = 0; i < length - 1; i++) {
minIndex = i;
for (var j = i + 1; j < len; j++) {
if (arr[j] < arr[minIndex]) { // 寻找最小的数
minIndex = j; // 将最小数的索引保存
}
}
temp = arr[i];
arr[i] = arr[minIndex];
arr[minIndex] = temp;
}
return arr;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
# 栈
栈是一种后进先出的列表,只有压入(push)和弹出(pop)两种操作。
# 递归
递归是一种函数自己调用自己解决方案,能用递归解决的问题都能用循环解决,递归并不是性能上的提升,而是更清晰,更容易理解。
递归都有基线条件和递归条件。
# 分治
分治算法divide and conquer,D & C,是一种著名的递归式问题解决方法。
# 归并排序
归并排序是将原始数组切分成较小的数组,直到每个小数组只有一个位置,接着将小数组归并成较大的数组,直到最后只有一个排序完毕的大数组。复杂度为O(nlog(n))
function mergeSort(array){
const {length} = array
if(length < 2) return array
const middle = Math.floor( length / 2 )
const left = mergeSort(array.slice(0, middle))
const right = mergeSort(array.slice(middle, length))
return merge(left, right)
}
function merge(left, right){
let i = 0;
let j = 0;
const result = []
while(i < left.length && j < right.length){
const leftItem = left[i]
const rightItem = right[j]
let item
if(leftItem < rightItem){
item = leftItem;
i++;
}else{
item = rightItem;
j++;
}
result.push(item)
}
return result.concat(i < left.length ? left.slice(i) : right.slice(j))
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
# 快速排序
快速排序是一种常用的排序算法,复杂度为O(nlog n),且性能比其他复杂度为O(nlog n)的排序算法好。
具体步骤如下:
- 从数组中选择中间一项作为基准值
- 划分,将数组分为大于基准值和小于基准值的两个数组
- 递归,递归上面划分的两个数组,知道所有都只有一个元素
根据划分的过程是否需要额外的内存,又可将其分为in-place(原地算法)和out-place两种
out-place
function quickSort(arr) {
//如果为空数组或者只有一个元素的数组,直接返回,递归的基线条件
if(arr.length < 2) return arr;
let pivotIndex = Math.floor( arr.length / 2 ),
pivot = arr.splice(pivotIndex, 1)[0],
left = [],
right = [];
for (let index = 0; index < arr.length; index++) {
const item = arr[index];
if (item < pivot){
left.push(item)
}else{
right.push(item)
}
}
console.log('quickSort', 'pivot', pivot, 'pivotIndex', pivotIndex, 'left', left, 'right', right);
left = quickSort(left);
right = quickSort(right);
return [...left, pivot, ...right]
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
in-place
function quickSort(arr) {
sortByIndex(arr, 0, arr.length - 1);
return arr
}
function sortByIndex(arr, left, right) {
if(arr.length < 2) return;
var pivotIndex = partition(arr, left, right); //基准值的索引值
console.log('pivotIndex', pivotIndex);
left < pivotIndex - 1 && sortByIndex(arr, left, pivotIndex - 1); //对索引值左边的元素进行排序
pivotIndex < right && sortByIndex(arr, pivotIndex, right); //对索引值右边的元素进行排序
}
function partition(arr, left, right){
let pivotIndex = Math.floor((left + right) / 2), //基准值的索引值为两者中间的元素
pivot = arr[pivotIndex],
i = left,
j = right; //基准值
let tmp = arr.slice(left, right - left + 1);
while (i <= j) {
while (arr[i] < pivot) {
i ++;
}
while (arr[j] > pivot) {
j --;
}
if(i <= j){
swop(arr, i, j);
i++;
j--;
}
}
console.log('sub arr', tmp, 'after', arr.slice(left, right - left + 1), 'pivotIndex', i, 'init pivotIndex', pivotIndex);
return i
}
function swop(arr, a, b){
let tmp = arr[a];
console.log('swop', a, b);
arr[a] = arr[b];
arr[b] = tmp;
// console.log(arr);
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
# 散列表
# 树
树是一种分层数据的抽象模型。一个树结构包含一系列存在父子关系的节点。每个节点都有一个父节点(除了顶部的第一个节点)以及零个或多个子节点。位于树顶部的节点叫作根节点。树中的每个元素都叫作节点,节点分为内部节点和外部节点。至少有一个子节点的节点称为内部节点。没有子元素的节点称为外部节点或叶节点。
子树由节点和它的后代构成。节点的一个属性是深度,取决于它的祖先节点的数量。树的高度取决于所有节点深度的最大值。
# 二叉树
二叉树中的节点最多只能有两个子节点:一个是左侧子节点,另一个是右侧子节点。这些定义有助于我们写出更高效的向/从树中插入、查找和删除节点的算法。
二叉搜索树(BST)是二叉树的一种,它只允许在左侧节点存储(比父节点)小的值,在右侧节点存储(比父节点)大(或者等于)的值。
遍历一棵树是指访问树的每个节点并对它们进行某种操作的过程。访问树的所有节点有三种方式:中序、先序和后序。
# 自平衡树
AVL(Adelson-Velskii-Landi)树是一种自平衡二叉搜索树,任何一个节点左右两侧子树的高度之差最多为1。添加或移除节点时,会尝试保持自平衡。
# 红黑树
红黑树(Red-Black Tree, RBT)也是一个自平衡二叉搜索树。每个节点都遵循以下规则:
- 每个节点不是红的就是黑的
- 树的根节点是黑的
- 所有叶节点都是黑的(用
NULL引用表示的节点) - 如果一个节点是红的,那么它的两个子节点都是黑的
- 不能有两个相邻的红节点,一个红节点不能有红的父节点或子节点
- 从给定的节点到它的后代节点(
NULL叶节点)的所有路径包含相同数量的黑色节点
# 图
# 图的相关概念
一个图G=(V, E)由以下元素组成:
V: 一组顶点E: 一组边,连接V中的顶点

由一条边连接在一起的顶点称为相邻顶点。例如C和D是相邻的。
一个顶点的度是其相邻顶点的数量。例如A的度是3。
路径是顶点v1, v2, …, vk的一个连续序列,其中vi和vi+1是相邻的。例如路径ABEI。简单路径要求不包含重复的顶点。除去最后一个顶点,环(ADCA)也是一个简单路径。
如果图中不存在环,则称该图是无环的。如果图中每两个顶点间都存在路径,则该图是连通的。
图可以是无向的(边没有方向,无向图)或是有向的(有向图)。有向图如下图所示:
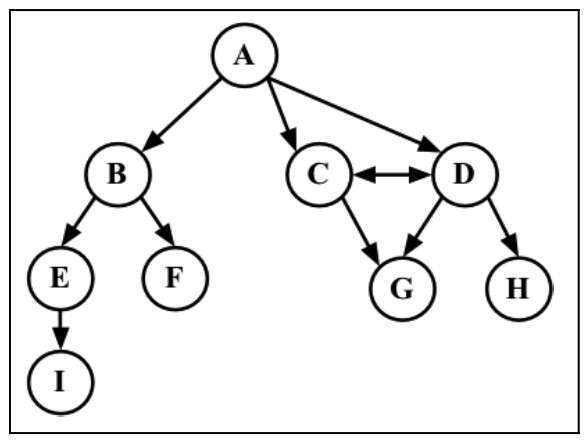
如果图中每两个顶点间在双向上都存在路径,则该图是强连通的。例如,C和D是强连通的。
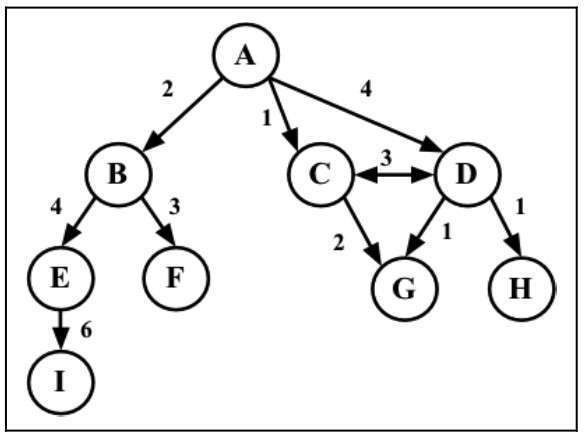
图还可以是未加权的或是加权的。加权图的边被赋予了权值,如下图所示:
# 图的表示
# 邻接矩阵
图最常见的实现是邻接矩阵。每个节点都和一个整数相关联,该整数将作为数组的索引,用一个二维数组来表示顶点之间的连接。如果索引为i的节点和索引为j的节点相邻,则array[i][j] === 1,否则array[i][j] === 0。
不是强连通的图(稀疏图)用邻接矩阵来表示,矩阵中将会有很多0,会对存储空间造成一定的浪费。
# 邻接表
还可以用一种叫作邻接表的动态数据结构来表示图。邻接表由图中每个顶点的相邻顶点列表所组成。可以用列表(数组)、链表,甚至是散列表或是字典来表示相邻顶点列表。邻接表对大多数问题来说都是更好的选择。
# 关联矩阵
还可以用关联矩阵来表示图。在关联矩阵中,矩阵的行表示顶点,列表示边。使用二维数组来表示两者之间的连通性,如果顶点v是边e的入射点,则array[v][e] === 1;否则,array[v][e] === 0。关联矩阵通常用于边的数量比顶点多的情况。
# 广度优先搜索
# 加权图与狄克斯特拉算法
# 贪心算法
# 贪心算法基础概念
狭义的贪心算法指的是解最优化问题的一种特殊方法,解决过程中总是做出当下最好的选择,因为具有最优子结构的特点,局部最优解可以得到全局最优解;这种贪心算法是动态规划的一种特例。能用贪心解决的问题,也可以用动态规划解决。
而广义的贪心指的是一种通用的贪心策略,基于当前局面而进行贪心决策。
# 贪心算法的思考过程
贪心的思考过程类似动态规划,依旧是两步:大事化小,小事化了。
大事化小:
一个较大的问题,通过找到与子问题的重叠,把复杂的问题划分为多个小问题;
小事化了:
从小问题找到决策的核心,确定一种得到最优解的策略。
# 斐波那契数列计算
递归
缺点,随着n的变大,执行次数大量增长
function getFibonacci(n){
if(n < 3){
return 1
}else{
return getFibonacci(n - 1) + getFibonacci(n - 2)
}
}
2
3
4
5
6
7
动态规划
通过一个数组保存中间结果,通过循环计算斐波那契数列,并将最后的值返回。 动态规划算法需要将中间结果保存起来。
//方案一
function getFibonacci(n){
if (n === 1 || n === 2){
return 1
}else{
let tmp = [1, 1];
for(let i = 2; i <= n; i ++){
tmp[i] = tmp[i - 1] + tmp[i - 2]
}
return tmp[n - 1]
}
}
//方案二
function getFibonacci(n){
if (n === 1 || n === 2){
return 1
}else{
let last = 1,
second = 1,
tmp;
for(let i = 2; i <= n; i ++){
tmp = last;
last = last + second;
second = tmp;
}
return last
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
# 算法复杂度
# 大O表示法
大O表示法用于描述算法的性能和复杂程度。将算法按照消耗的时间进行分类,依据随输入增大所需要的空间/内存。
常用的函数有:
| 符号 | 名称 |
|---|---|
O(1) | 常数的 |
O(log(n)) | 对数的 |
O(log(n))c | 对数多项式的 |
O(n) | 线性的 |
O(n2) | 二次的 |
O(nc) | 多项式的 |
O(cn) | 指数的 |